2022 / Day 17: A map without a computer
I have a scrapbook for plotting out ideas of SQL processing flows and for todays entry I decided to revisit some of the old ones. Found a bunch of sketch-ups for a little something I did about 1.5 years ago. And I must apologize - as it has been already some time then most probably I won’t remember all the fine print details.
But. The task was to find a way to create road areas (polygons around road centerlines) from cadastral point descriptions. Yes, sure the points had a specific location, but the main goal was to use a description like “5.5 meters from the centerline” to shift the points around so that if the geometry of the road centerline changes, the road surface area would be recalculatable on the fly.
As a side-note: the structure of this description with a point itself was not a concern. At least in that moment.
But I remember distinctly thinking that this is essentially a question of a
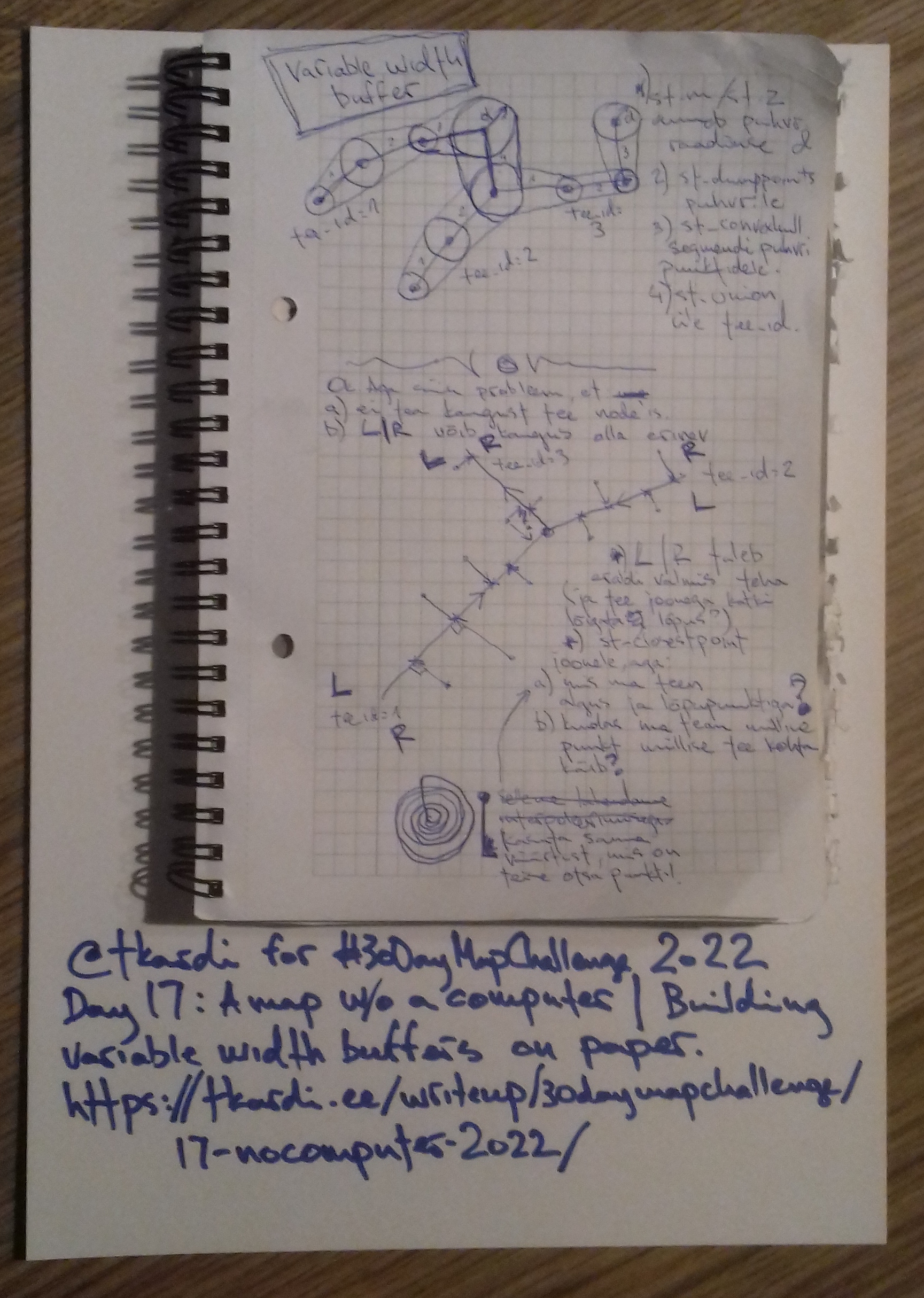
variable width buffer for the road centerline geometry. Which, given that we
know the desired width at a linestrings node (
which can be stored e.g either as m-coordinate and retrieved via
st_m or z-coordinate and retrieved via
st_z) can be calculated as a
st_union over the linestrings
identifier of all st_convexhull
polygons created from st_dumppoints
points of a segmentized linestrings
st_firstpoints and
st_lastpoints
st_buffers to the required width. Or
in a bitsy more simplified form
select
oid, st_union(geom) as geom
from (
select
oid, ord,
lag(ord) over (partition by oid order by ord) as lag_oid,
st_convexhull(
st_collect(
array[
geom,
lag(geom) over (partition by oid order by ord)
]
)
) as geom
from (
select
oid,
pts.path[1] as ord,
st_buffer(pts.geom, st_z(pts.geom)) as geom
from (
select
1 as oid,
st_makeline(
array[
st_pointz(0,0,5),
st_pointz(10,10,1),
st_pointz(20,20,5),
st_pointz(20,10,3.5)
]
) geom
) d
join lateral
st_dumppoints(d.geom) pts on true
) e
) f
where
lag_oid is not null
group by
oid
;Which returns something in the line of

But there are a few issues to be solved here first (as I see from the notes):
- we don’t know distances at the nodes of the road centerline but rather at some whatever locations beside the centerline.
- we’ll need to deal with left and right hand side of the road centerline vector independently as the buffer width might vary (e.g 5m on the L, but 15m on the R).
In the end the solution I came up with is essentially to snap points to the road centerline st_closestpoint or st_linelocatepoint - I can’t remember any more which one I used. Create the required buffers as with the variable width buffer, st_split the buffer with the road centerline, figure out if I need to keep the left- or right-hand side one, and then union these over the road centerline together.
Some additional notes from here are the questions:
- what to do with the first and last points of the centerline. The first idea of interpolation (from previous or next nodes of the line) seems to be crossed out as that would lead to disproportionate buffer sizes (imagine a steadily increasing array of 1m, 5m, 10m, or decreasing for that matter) - so instead use the value at the other end of that specific segment.
- but more pressingly: how would I know which points are connected to which road centerline. And for the life of me I can’t remember any more how this was supposed to be tackled.
{kind=link}